

联合仿真干货:Adams用户子程序的理解及联合仿真中的应用
引言
随着工程仿真技术的发展,复杂系统的联合仿真需求越来越多,特别是在机电液等多领域的系统中,仿真工具需要协同工作以更好地捕捉系统中的动态行为。在这种背景下,Adams 作为一种强大的多体动力学仿真软件,在实现系统级仿真中扮演了重要的角色。而为了进一步增强仿真模型的灵活性和功能,用户子程序成为了 Adams 中不可或缺的工具。
本文将介绍 Adams 的联合仿真技术路线以及用户子程序在联合仿真中的应用,帮助读者更好地理解这些工具,并探索它们在仿真中的应用场景。
第一部分:常见的Adams 联合仿真技术路线概述
1.1 联合仿真的意义与挑战
联合仿真是指在多个领域模型之间进行联合计算,以捕捉真实系统的动态行为。这种方法在复杂系统(如机电液联合系统)中尤其重要。然而,联合仿真往往面临着模型兼容性、计算时间和数据传递效率等方面的挑战。
1.2 当前 Adams 与其他软件的联合仿真方法
在 Adams 和其他软件(如 MATLAB 或 AMESim)之间进行联合仿真的方法有限,目前常用的有以下两种:
机械系统导出法
这种方法通过 Adams 的机械系统导出功能,导出仿真模型并在其他软件(例如 Simulink)中调用。
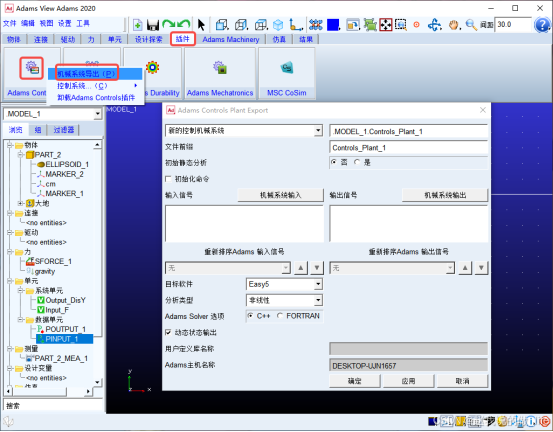
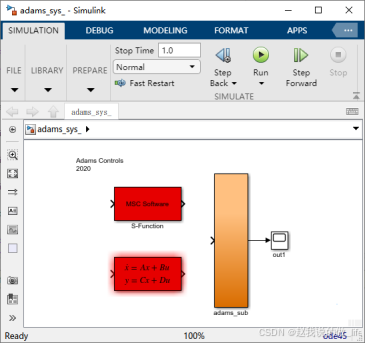
- 实现步骤:导出 Adams 的模型为适用于 Simulink 或 AMESim 的数据文件,然后在目标软件中利用这些数据文件进行仿真。
- 优缺点:这种方法的优点是能够在另一个软件中启动 Adams 系统并进行仿真,使数据实时交互,但在 Adams 模型较大时,启动和计算时间较长,尤其是在调试阶段,需要反复启动 Adams 并加载模型,效率较低。这部分内容可以参考主页的相关教程:Adams+Simulink仿真案例制作(Simulink+AMESim+Adams)。
基于 FMI 的联合仿真
另一种较为复杂的联合仿真方法是使用Functional Mock-up Interface (FMI) 技术。
- 优点:FMI 具有高度的灵活性,可以将 Adams 系统打包成 FMU 文件用于其他软件中调用,也可以将其他系统通过 FMU 文件导入 Adams 中使用。这种方法为多领域模型间的通讯提供了强大的可能性。
- 缺点:FMI 的实现需要较高的编程技能,尤其是在 Adams 中实现 FMI 时,相关资料非常少,这成为了一大挑战。本人曾在业余时间尝试使用 Python 打包 FMU 仿真系统、利用 TCP/IP 通讯建立客户端和服务端并打包成 FMU 文件,但最终因 Adams 对 FMI 支持不足而未能成功。
- 发展:目前,已有一些商用软件使用 FMI 技术并提供了更简便的用户界面,可用于快速实现联合仿真,但对于个人用户来说,需要评估其使用费用。
第二部分:Adams 用户子程序的理解
2.1 用户子程序的基本概念
用户子程序是一种可以在仿真过程中对模型仿真参数进行定制化操作的程序。类似于 Abaqus 的 UMAT 和 UAMP 子程序,用户可以通过编写子程序,在仿真过程中动态修改材料属性、控制输入参数等。
在 Adams 中,用户子程序的作用主要体现在实时调整仿真参数上。例如,某些驱动的大小可能随着模型的状态而变化,或者某些组件的位置可能会随着某个计算变量的数组而变化,这些都可以通过用户子程序来实现。
2.2 Adams 用户子程序的用途
基于 Adams 用户子程序的特性,可以设想以下应用场景:
- 根据测量参数修改驱动参数:仿真过程中,实时测量的参数可以用于调整驱动的大小。
- 基于本地文件信息修改驱动参数:读取本地文件中的数据并用于控制输入。
- 通过接收到的外部信息修改驱动参数:通过外部系统与 Adams 通讯,基于接收到的信息对仿真进行控制。
这些场景的共通之处在于最终都要动态修改某个参数,依据可以是测量、文件数据甚至是外部系统的输入。这些应用场景为实现联合仿真的基础通讯环节奠定了基础。
第三部分:Adams 用户子程序与联合仿真的基础通讯
3.1 用户子程序在联合仿真中的角色
在联合仿真中,用户子程序的作用尤为重要。它可以实时修改仿真中的关键参数,使得 Adams 能够响应来自外部系统(如 MATLAB 或 AMESim)的控制指令,实现系统间的协同工作。
3.2 实现联合仿真通讯的关键步骤
- 通讯协议选择与配置:在联合仿真中,常用的通讯协议包括 TCP/IP 协议。通过该协议,可以实现不同软件之间的实时数据传递。
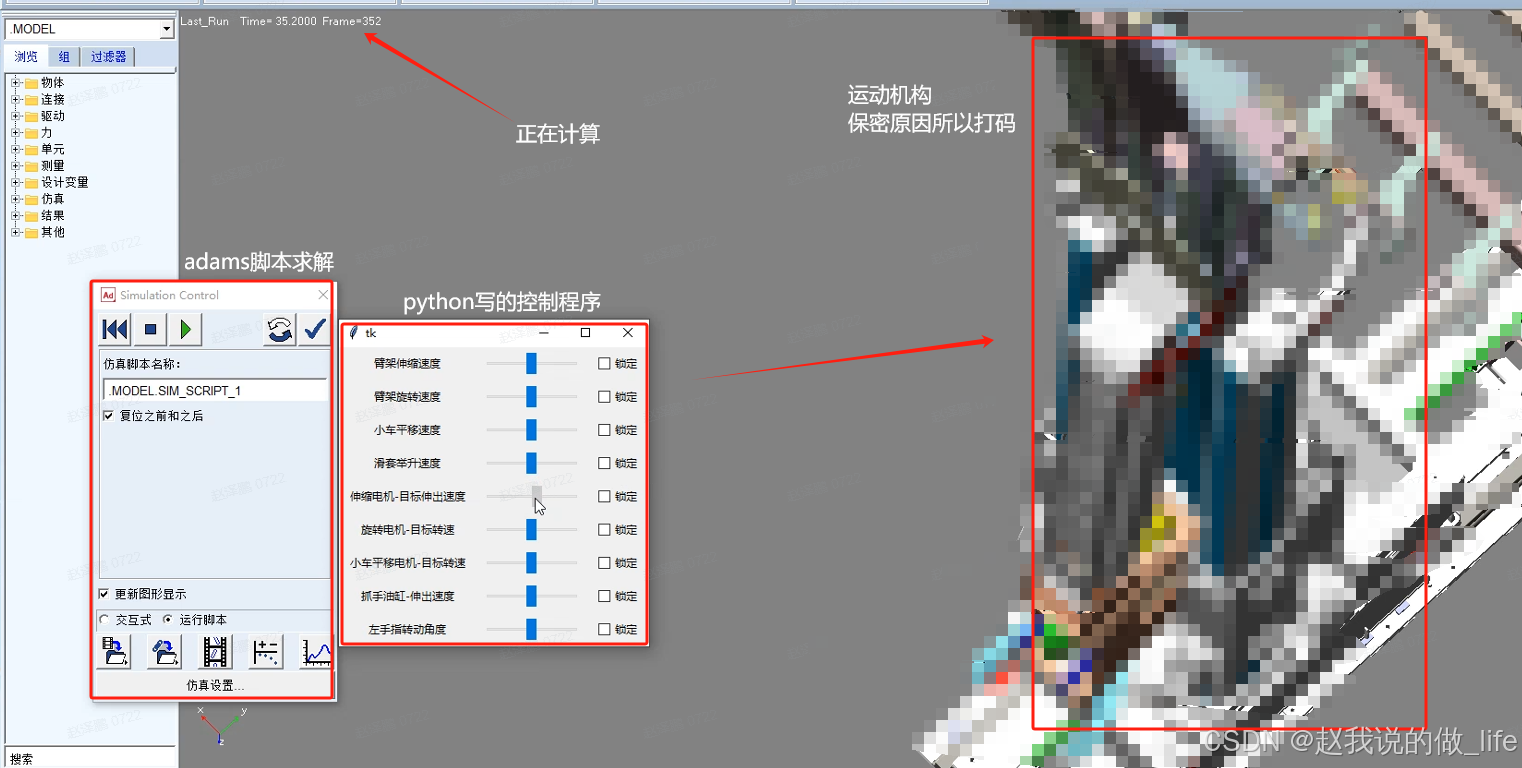
3.3 联合仿真的应用实例
以一个实际案例为例,通过用户子程序与 Python 进行 TCP/IP 通讯,实时获取外部数据并用于修改 Adams 中的驱动参数。这种方式下,外部系统能够与 Adams 仿真实时联动,有效增强仿真的互动性和真实性。
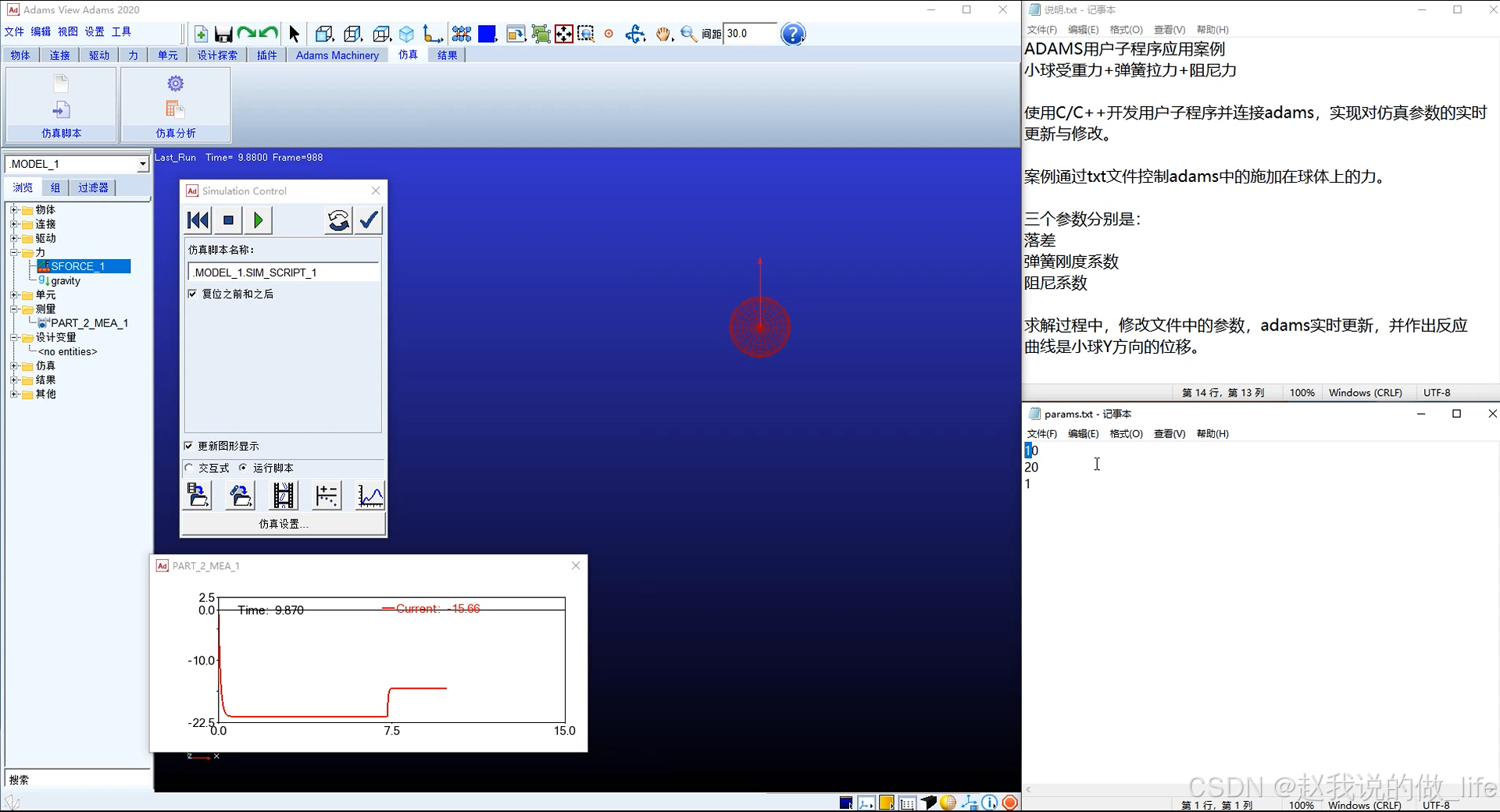
这个工程中使用到了python\C语言\AdamsSolve脚本比较复杂,为了方便学习,我们设计了一个简单的案例:弹簧挂小球,通过修改本地txt文件同步控制弹簧刚度、阻尼系数、悬挂高度,观察小球运动。
实现步骤包括:
- 搭建弹簧小球模型
- 用户子程序开发
- 子程序编译及挂载
- 子程序的调用
- 测试验证
实现效果:
第四部分:应用建议
4.1 用户子程序的应用建议
对于初学者来说,建议先掌握用户子程序的基本概念和编写方法,逐步探索与外部工具的联合仿真。调试阶段,可以先从小模型入手,尽量减少启动时间,并使用模块化的代码结构,以便于调试和维护。
结论
本文详细介绍了 Adams 联合仿真技术路线以及用户子程序的应用。通过用户子程序,我们可以在仿真过程中动态调整模型的参数,实现多领域联合仿真。虽然联合仿真存在一定的技术难点,但随着仿真工具的不断发展,这些难点正在逐步被解决。希望通过本文的介绍,读者能够更好地理解用户子程序的应用,并在仿真中探索新的可能性。
看到这里大家应该迫不及待想知道这个东西到底是怎么实现的了吧。别急,作者还在苦命加班中,整理好马上就发出来哦~~~~
针对上述内容,如果有疑问可以留言,我会及时回复。有合作需要可以从下面二维码联系到我。
实战视频:数字孪生虚拟样机系统演示